이거 학기초에 만든다는 얘기들었을 때는 재미있을것 같더니만,
교수님은 그냥 떡하니 핸디보드만 넘겨주고 뭘 자꾸 하라시니..
C언어도 안배워서 소스 봐도 모르겠구만..
아무튼 어떻게 어떻게 해서 소스만들었는데 잘 되려나..
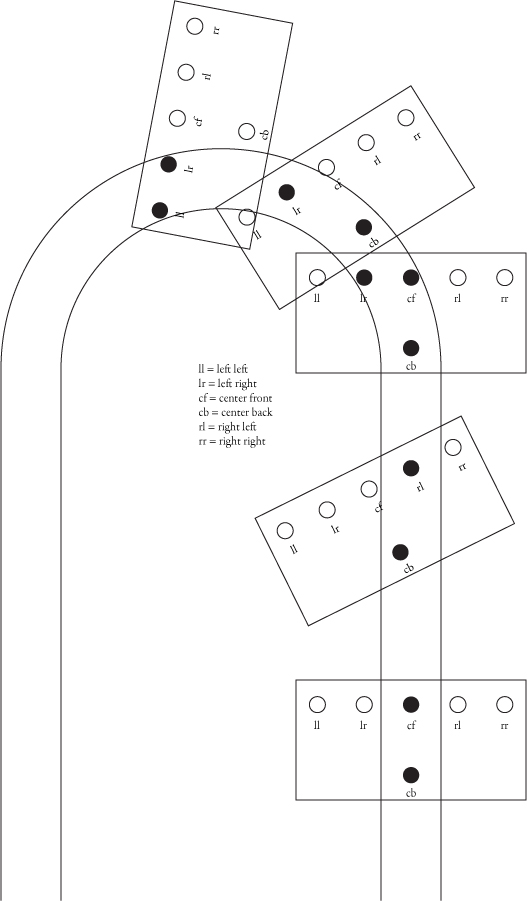
센서는 발광부와 수광부가 합쳐져 있고 sg-2bc라는 모델이다.
6개 중에 앞에 5개 뒤에 1개를 달았다.
지금 소스는 앞 줄의 센서가 방향을 잡고,
뒤의 센서는 라인 이탈시에 라인으로 들어오도록 했다.
그런데 아래 그림 그리면서 알았는데
cb 센서가 라인 이탈시에 후진을 하면 안될 것 같다.
좀 더 생각해 보고 모르겠으면
그냥 직진과 종착지에서 멈추는데에만 써야겠다.
또 생각났다.
좌,우회전 시에 한쪽 바퀴를 멈추게 했는데
이렇게 하면 라인을 벗어날 일은 적지만
방향 잡고 조금 직진하고, 다시 방향 잡고 조금 직진하는 일이 반복되기 때문에
시간이 너무 오래 걸릴 것 같다.
한쪽 바퀴도 약간 움직이게 조절해야 한다.
 invalid-file
invalid-fileint motl=0, motr=1; //motor left=0, motor right=1
int s=40; //motor speed
int ll=7, lr=6, cf=5, cb=4, rl=3, rr=2; //sensor
float dt=0.5; //delay time
int ll_notape, lr_notape, cf_notape, cb_notape, rl_notape, rr_notape; //sensor on no tape
int ll_tape, lr_tape, cf_tape, cb_tape, rl_tape, rr_tape; //sensor on tape
int ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver, d; //sensor values averge
void main(){
calibrate();
init();
d=6;
while(1){
if (d==1) {
while((analog(ll)<=ll_aver)&&(analog(lr)<=lr_aver)&&(analog(cf)>cf_aver)&&(analog(cb)>cb_aver)&&(analog(rl)<=rl_aver)&&(analog(rr)<=rr_aver)){
motor(motl,0);
motor(motr,2*s);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //speed left
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
if (d==2) {
while((analog(ll)<=ll_aver)&&(analog(lr)<=lr_aver)&&(analog(cf)>cf_aver)&&(analog(cb)>cb_aver)&&(analog(rl)<=rl_aver)&&(analog(rr)<=rr_aver)){
motor(motl,0);
motor(motr,s);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //left
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
if (d==3) {
while((analog(ll)<=ll_aver)&&(analog(lr)<=lr_aver)&&(analog(cf)>cf_aver)&&(analog(cb)>cb_aver)&&(analog(rl)<=rl_aver)&&(analog(rr)<=rr_aver)){
motor(motl,s/2);
motor(motr,s/2);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //dec
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
if (d==4) {
while((analog(ll)<=ll_aver)&&(analog(lr)<=lr_aver)&&(analog(cf)>cf_aver)&&(analog(cb)>cb_aver)&&(analog(rl)<=rl_aver)&&(analog(rr)<=rr_aver)){
motor(motl,-s);
motor(motr,-s);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //back
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
}
if (d==5) {
while((analog(ll)<=ll_aver)&&(analog(lr)<=lr_aver)&&(analog(cf)>cf_aver)&&(analog(cb)>cb_aver)&&(analog(rl)<=rl_aver)&&(analog(rr)<=rr_aver)){
motor(motl,s);
motor(motr,0);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //right
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
if (d==6) {
while((analog(ll)<=ll_aver)&&(analog(lr)<=lr_aver)&&(analog(cf)>cf_aver)&&(analog(cb)>cb_aver)&&(analog(rl)<=rl_aver)&&(analog(rr)<=rr_aver)){
motor(motl,2*s);
motor(motr,0);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //speed right
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
while((analog(ll)<=ll_aver)||(analog(lr)<=lr_aver)||(analog(cf)>cf_aver)||(analog(cb)>cb_aver)||(analog(rl)<=rl_aver)||(analog(rr)<=rr_aver)){
motor(motl,2*s);
motor(motr,2*s);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //acc
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
while((analog(ll)>ll_aver)||(analog(lr)>lr_aver)||(analog(cf)>cf_aver)||(analog(cb)>cb_aver)||(analog(rl)>rl_aver)||(analog(rr)>rr_aver)){
motor(motl,0);
motor(motr,0);
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, cb_aver, rl_aver, rr_aver); //stop
if (analog(ll)>ll_aver)
d=1;
if (analog(lr)>lr_aver)
d=2;
if (analog(cf)<=cf_aver)
d=3;
if (analog(cb)<=cb_aver)
d=4;
if (analog(rl)>rl_aver)
d=5;
if (analog(rr)>rr_aver)
d=6;
}
}
}
}
/********** Subroutines *******************************/
void test(){
while((analog(cf)>=cf_tape)&(analog(cb)>=cb_tape)){
motor(motl,s);
motor(motr,s);
printf("%d %d %d %d %d %d\n",analog(ll),analog(lr),analog(cf),analog(cb),analog(rl),analog(rr)); //straight
}
ao();
while (analog(lr)>=lr_tape){
motor(motl,-s);
motor(motr,s);
printf("%d %d %d %d %d %d\n",analog(ll),analog(lr),analog(cf),analog(cb),analog(rl),analog(rr)); //right
}
while (analog(rl)>=rl_tape){
motor(motl,s);
motor(motr,-s);
printf("%d %d %d %d %d %d\n",analog(ll),analog(lr),analog(cf),analog(cb),analog(rl),analog(rr)); //left
}
}
void calibrate(){
int temp;
while(!stop_button()){
ll_notape=analog(ll);
lr_notape=analog(lr);
cf_notape=analog(cf);
cb_notape=analog(cb);
rl_notape=analog(rl);
rr_notape=analog(rr);
printf("No Tape: %d %d %d %d %d %d\n",ll_notape,lr_notape,cf_notape,cb_notape,rl_notape,rr_notape); //no tape value
sleep(.1);
}
tone(800.,1.);
while(!stop_button()){
ll_tape=analog(ll);
lr_tape=analog(lr);
cf_tape=analog(cf);
cb_tape=analog(cb);
rl_tape=analog(rl);
rr_tape=analog(rr);
printf("Tape: %d %d %d %d %d %d\n",ll_tape,lr_tape,cf_tape,cb_tape,rl_tape,rr_tape); //tape value
sleep(.1);
}
temp=(ll_tape-ll_notape)/2;
ll_aver=ll_notape+temp;
temp=(lr_tape-lr_notape)/2;
lr_aver=lr_notape+temp;
temp=(cf_tape-cf_notape)/2;
cf_aver=cf_notape+temp;
temp=(rl_tape-rl_notape)/2;
rl_aver=rl_notape+temp;
temp=(rr_tape-rr_notape)/2;
rr_aver=rr_notape+temp;
temp=(cb_tape-cb_notape)/2;
cb_aver=cb_notape+temp; //sensor values average
printf("aver: %d %d %d %d %d %d\n", ll_aver, lr_aver, cf_aver, rl_aver, rr_aver, cb_aver);
tone(800.,1.);
}
void init(){
printf("Press Start to Go!\n");
while(!start_button()){}
tone(800.,1.);
}
p.s. 위의 소스로는 작동이 불가합니다..;;
'일상 > 리뷰 및 사용기' 카테고리의 다른 글
| 맛집을 찾아 외식을 나가보자! (2) | 2008.07.07 |
|---|---|
| 여행은 어떻게 준비해야 할까? (0) | 2008.07.05 |
| CD 커버 만들기 (0) | 2008.04.20 |
| 카메라 렌즈 망원경으로 만들기 (8) | 2008.04.13 |
| SB-800 옴니 자작기 (0) | 2008.01.27 |


